LiDAR Scans
RealityScan enables automatic registration, filtering, coloring, texturing, and meshing of LiDAR data. There are no limitations on the number of scans or the size of your project and even very large datasets can be processed.
You’ve already imported LiDAR data into the project. Congratulations! You can now skip the import step and proceed with creating a 3D model. Alternatively, press Ctrl+N to start a new scene and import the LiDAR data again.
LiDAR Import
It is possible to import ordered terrestrial LiDAR data, where points follow the scanner’s original acquisition pattern, as well as mobile LiDAR data that can be easily aligned with photogrammetry data. During import, the LiDAR data is converted into LSP files—an internal format which resemble images.
LSP files are stored locally, either alongside the original LiDAR data or at a custom location. Once imported, it is not necessary—and not recommended—to re-import the same LiDAR scans when starting a new project, as this would overwrite the existing LSP files. Instead, use the previously generated LSP files to avoid redundant processing.
To import LiDAR scans, simply drag and drop them into your project. Alternatively, you can click the button in the WORKFLOW tab, then select from available import options and define the source folder.
Terrestrial LiDAR
The terrestrial LiDAR data, with the points stored in a structured pattern that reflects how the scanner acquired them, can be imported in formats PTX, E57, PLY, and ZFS/ZFPRJ file formats.
Mobile LiDAR
Supported formats include LAS/LAZ, E57, PLY, CSV, XYZ, and ASCII PTS. After import, camera poses for the LSP files are either taken from existing poses (prior or registered) or generated automatically, if that option is selected.
Import Settings
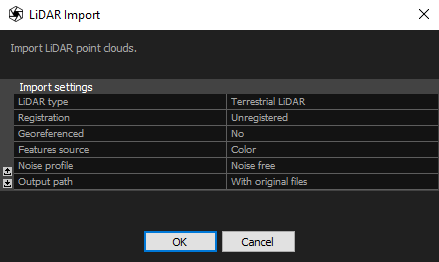
The import setting for terrestrial and mobile LiDAR data are similar, but some of them differ. Below is a list of all available import settings:
- LiDAR type The type is detected automatically based on the file format, but the setting can still be changed manually. The options are Terrestrial LiDAR and Mobile LiDAR. However, it is not recommended to modify the default selection.
- Registration Defines how precisely the scans were registered before import:
-
- Exact Imported poses will be preserved. The imported model defines the scene's coordinate system
- Draft Scanning stations have been roughly registered but require fine-tuning.
- Unregistered Stations have not been registered. The registration engine will calculate poses for all scans.
- Georeferenced Set this option to Yes when your LiDAR scans are georeferenced and you want this type of data to be included in your project.
- Coordinate system When the Georeferenced setting is set to Yes, specify the coordinate system.
- Features source Select whether to use a color or an intensity channel for registering photos to LiDAR scans. Color is the default value. For Z+F scans use Color if there are corresponding .jpg files next to the source files.
- Noise profile Defines how the point cloud precision changes with the growing distance from the scanner station and intensity value. You can select Noise free profile, ScanStationP20 or define your own profile based on the LiDAR scanner technical documentation. To add a new profile, edit the noiseprofiles.xml file. You can find it in the application installation folder.
- Import classification An option available when importing LAS or LAZ files that contain classification data. Imported classes will be listed in the 1Ds view under LiDAR Classification.
- Output path LSP files can be stored in the same directory as the original data or in a custom location.
- Custom path If Output path is set to Custom, specify the directory where the LSP files should be saved.
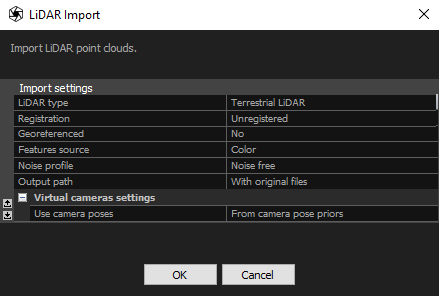
Importing mobile LiDAR scans includes settings for virtual cameras, which are not used with terrestrial LiDAR. These settings are listed below:
- Use camera poses Choose how the camera poses for the virtual cameras will be calculated. They can be taken from prior camera poses, from an existing component with registered poses, or generated automatically.
- Extract from component If you choose to create camera poses from an existing component, specify which component should be used.
- Height reference Set the height reference above the scan when choosing to generate mobile poses automatically.
- Camera height Set the height above the chosen reference. It’s recommended to match the height of the sensor above the ground used during scanning.
- Camera overlap percentage Set the overlap between the generated camera poses. Higher values result in greater camera density.
- Camera cluster Choose how the camera cluster will be generated from your scan. The options include generating a single camera in a cluster, one camera with four additional cameras at a specified off-nadir angle, or six cameras as used for terrestrial LiDAR scans.
- Off-nadir camera angle When set to a non-zero value, four additional cameras will be generated around the nadir camera at the specified angle.
Continue
Register LiDAR scans and create a component
See also:
- Setting the project coordinate system click here